Honda Kohei本田 康平
- 1995年生まれ
- 2021年3月 名古屋大学工学研究科 博士前期課程修了
- 2021年4月 名古屋大学工学研究科 博士後期課程進学
- 2023年4月 日本学術振興会 特別研究員(DC2)採用

多様で複雑な運転行動を実現する次世代の自動運転知能を目指して
自動運転は人類に自由と安全をもたらす次世代のモビリティ技術として注目を集めています。自動運転は2000年代初頭から研究開発が急速に進み、近年ではLv.4 自動運転タクシーサービスが米国のいくつかの限定市街領域で展開されています。しかしながら、これらの自動運転システムはその走行環境に特化した入念なエンジニアリングによる賜物であり、あらゆる場所や複雑な交通環境での自動運転は現状の科学技術では難しいものとなっています。自動運転をより様々な環境で実現していくためには、人間が行っているような複雑かつ多様な運転行動を柔軟に達成可能な自動運転知能が必要です。
私はモデル予測制御(MPC)という理論を土台として、複雑で多様な運転行動を実現するような自動運転知能の創出を目指して研究をしています。MPCとは少し先の未来を予測しながら、その時々の予測状態を最適化するという制御理論の枠組みの一つです。MPCを自動運転に適用するためには、状況ごとに達成したい運転行動を最適制御問題という数式表現に落とし込みます。そのため、従来は膨大な運転シーンごとに最適制御問題を手作りする必要がありました。しかしながら、必要な運転行動は非常に多岐にわたるため、それらの最適制御問題を一つずつ手作りで設計するというアプローチはシステムの拡張性に限界があります。
そこで本研究では、時々刻々と変化するMPCの最適制御問題を半自動的に実時間で生成し、それらを滑らかに切り替えながら走行する自動運転フレームワークを開発しました(図1)。アイデアとしては非常にシンプルで、最適制御問題を事前にPrimitiveという小さな要素に分解・設計しておき、それらをブロックのように組み合わせたり、取り替えたり、少し変形してあげることによって、様々な最適制御問題を表現することができます。結果として、数個のPrimitiveを用いて数十の運転行動を達成することがシミュレーションによって示されました。また、自動車メーカーの方々と協力した実車両実験や1/10スケールの自動運転ラジコンカーによる検証等も行なっています(図2)。
今後は大規模言語モデル等を用いて、最適制御問題というある種の自然言語を自動的に生成することで、社会性や一般常識を考慮しつつ、より柔軟に多様な運動を実現可能な自律知能を創出したいと考えています。
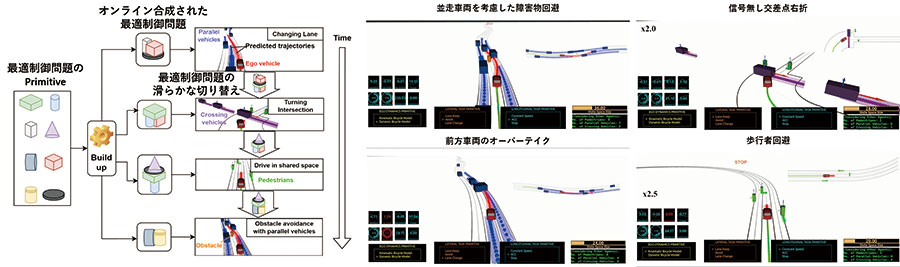
図1 (左)提案するフレームワークと(右)シミュレーション結果例

図2 (左)実験に使用した自動運転車両 (右)10分の1スケールラジコンカーの自動運転レース世界大会で4位入賞